Francesca's Digital Portfolio 🚀
 Last updated: 25 March 2026
Last updated: 25 March 2026
Quick Navigation

About Me

Hello and welcome to my digital portfolio! ☀️
My name is Francesca and I'm from a little town in Northern Italy but currently based in the USA. I am a very motivated graduate student currently studying for my master's degree in Mechanical Engineering at Yale University, and a background in Aerospace Engineering. I consider myself a very creative and project-driven person that thrives in fast-paced environments. I am experienced in independently leading multidisciplinary projects, using data, technical tools, and structured planning to improve processes and enable reliable, high-quality outcomes.
I have served as project manager and principal investigator of my senior design team, and I have hands-on experience with a wide range of computational, coding, and CAD tools (full list here), as well as producing technical documentation and formal design reviews (like SRR, PDR, CDR..). ✨
I love everything that has to do with aerospace and engineering, spanning from robotics to space. In my free time I love reading books - mainly fictional novels - and if I'm not tinkering with something mechanical, I'm probably at the gym, horse-riding, or painting. ☕️📖
At Yale, I have also been actively involved in the Society of Women in Engineering (SWE) outreach committee, where I am deeply committed to inspiring the next generation - especially girls - to pursue STEM fields. 🫧
I’m eager to apply my skills, continue growing, and to contribute meaningful work!
⏩ Please, feel free to contact me at francesca.afruni@yale.edu. CV, transcripts, and recommendations available upon request. ⏪
Education

-
B.S. Aerospace Engineering with Honors,
Florida Institute of Technology, USA
(May 2025)
- Study Abroad (Calculus 3 and British Literature), University of Oxford, UK (June 2022 – August 2022)
-
M.S. Mechanical Engineering, Yale University, USA (August 2025 – Expected: May 2026)
Go Bulldogs 🐶
Skills, Languages & Co-curriculars
Engineering Skills
CAD Tools: SolidWorks, Creo PTC, Fusion 360, NX.
ANSYS Software: Fluent, APDL, Workbench (Static Structural).
Coding Languages: MATLAB, Simulink, Python.
Others: MS Office, 3D Printing, 3D scanning, Laser Cutting, Soldering.
Languages
Italian (mother-tongue), English (Bilingual knowledge), Spanish (School-level)
Soft Skills
Team-work, Project Management, Communication, Problem Solving, Adaptability
Co-curriculars
GradSWE (Society of Women in Engineering) (outreach committee), WAE (Women in Aerospace Engineering), AIAA (American Institute of Aeronautics & Astronautics), ARES (Astrobiological Research & Education Society)
Senior Design Project
Project DROVER (Drone Rover Operations on Versatile Extra-hazardous Regions)
 The primary objective of Project DROVER is to design, build, and fly a drone-rover hybrid prototype designed to enhance search and rescue operations capable of aerial and terrestrial navigation to locate and assist people in distress. This prototype will demonstrate the unique capability to land and drive when traversal via flying is not possible. Additionally, the vehicle will showcase the ability to execute turning maneuvers while airborne and land at an inclined angle. This hybrid vehicle holds the potential to revolutionize search and rescue operations by harnessing the energy efficiency of a rover combined with the agile air mobility of a drone.
The unique dual-mode design of the DROVER opens a new wide range of possibilities for the utilization of technology to positively impact human lives. Its design is easily interchangeable to accommodate different possible versions (for example, to assist agriculture, military operations, search and rescue, and inspection of hazardous areas).
This particular version will be focused on search and rescue operations, which often struggle with limited accessibility and time constraints. The DROVER will address these issues by providing quick and versatile navigation through both air and land. This version of DROVER targets emergency response units, including fire departments, search and rescue teams, and disaster relief organizations, aiming to improve their operational efficiency and effectiveness in challenging terrains.
The primary objective of Project DROVER is to design, build, and fly a drone-rover hybrid prototype designed to enhance search and rescue operations capable of aerial and terrestrial navigation to locate and assist people in distress. This prototype will demonstrate the unique capability to land and drive when traversal via flying is not possible. Additionally, the vehicle will showcase the ability to execute turning maneuvers while airborne and land at an inclined angle. This hybrid vehicle holds the potential to revolutionize search and rescue operations by harnessing the energy efficiency of a rover combined with the agile air mobility of a drone.
The unique dual-mode design of the DROVER opens a new wide range of possibilities for the utilization of technology to positively impact human lives. Its design is easily interchangeable to accommodate different possible versions (for example, to assist agriculture, military operations, search and rescue, and inspection of hazardous areas).
This particular version will be focused on search and rescue operations, which often struggle with limited accessibility and time constraints. The DROVER will address these issues by providing quick and versatile navigation through both air and land. This version of DROVER targets emergency response units, including fire departments, search and rescue teams, and disaster relief organizations, aiming to improve their operational efficiency and effectiveness in challenging terrains.
There are some important features to mention that help DROVER with the mission:
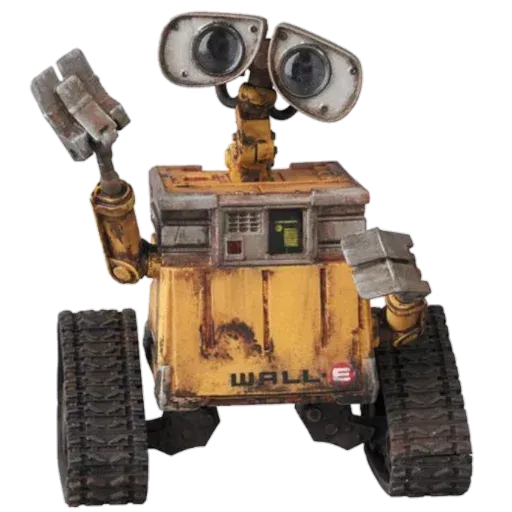
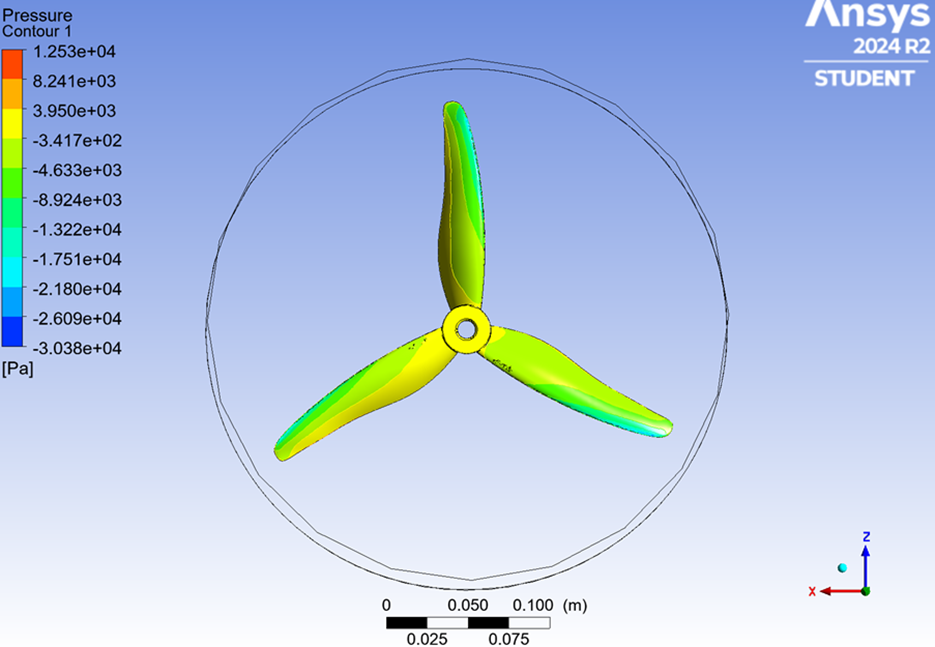
• FPV Camera & IR Camera: the first is the eyes of the pilot and helps navigating DROVER as well as locating the potential victims, the second is to help pilot and DROVER locating potential rescuees trapped under rubble or debris.
• Microphone & Speaker: DROVER is equipped with microphone and speaker to be able to engage in a two-way communication with the potential person in distress.
• Payload: on the back of DROVER is possible to attach a small payload up to 600g, this is to manage to transport items like a 0.5L water bottle, medication, food, etc.
DROVER can be considered an overall success, as all its objectives were achieved! These are some testing examples DROVER underwent:
• Tested live video feed of FPV camera and IR camera during operations.
• Established 2-way verbal communication.
• Tested flying and driving capabilities of the prototype independently and combined.
• Completed obstacle course with 600g payload, featuring 20° inclines and diverse terrains.
• Implemented automatic landing failsafe in case of controller signal lost and low system battery.
• Conducted endurance test resulting in a 15-minute hover time.
Read our Final Report HERE
FOR MORE ABOUT DROVER ON THE FLORIDA TECH SENIOR DESIGN SHOWCASE PAGE CLICK HERE
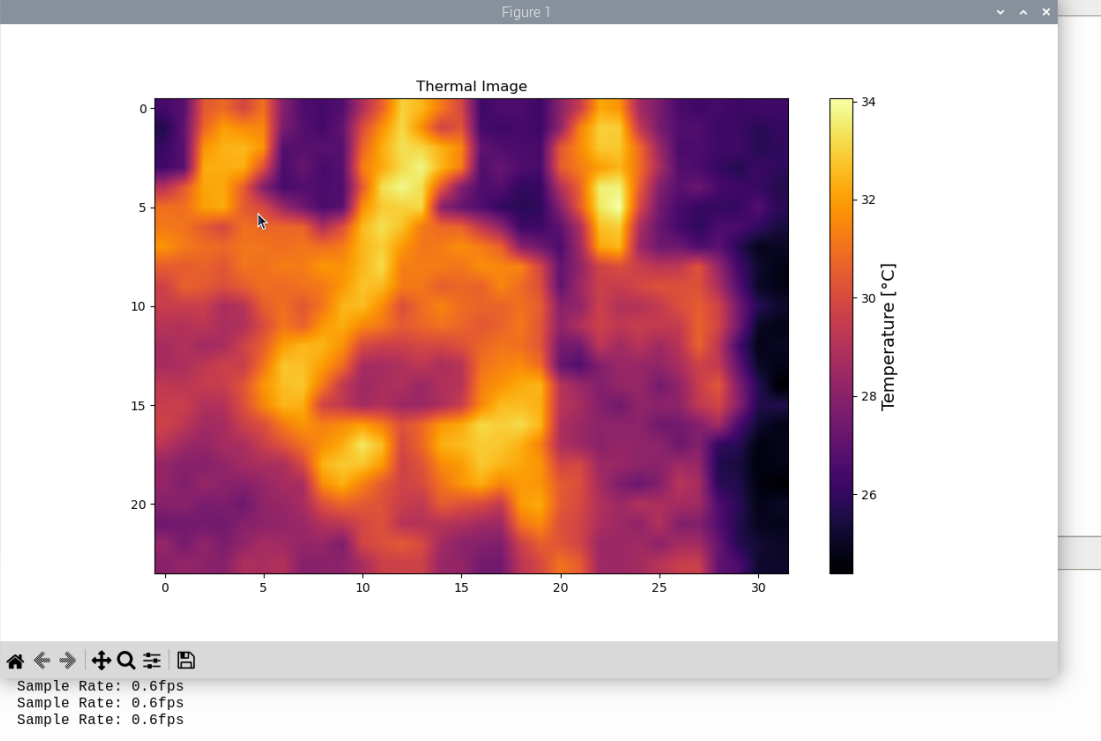
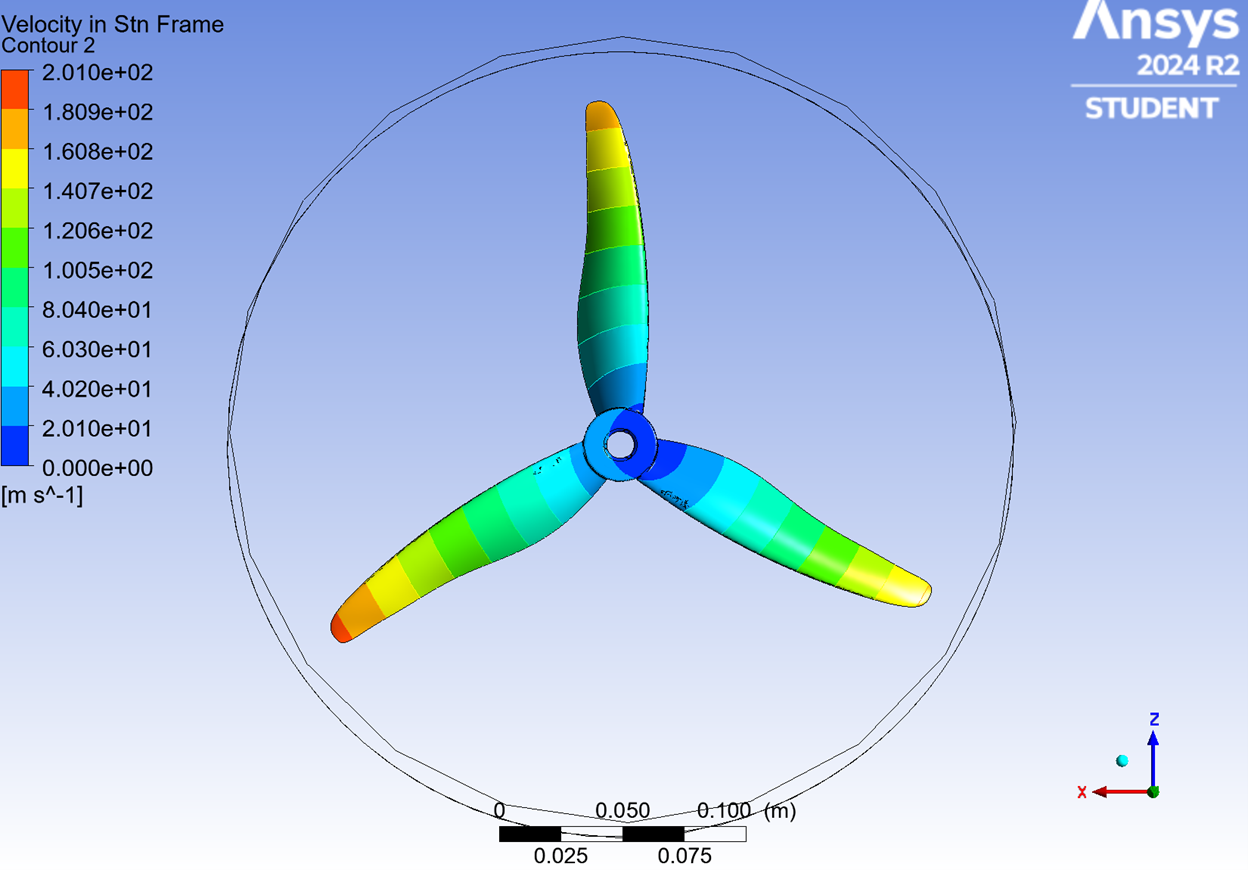
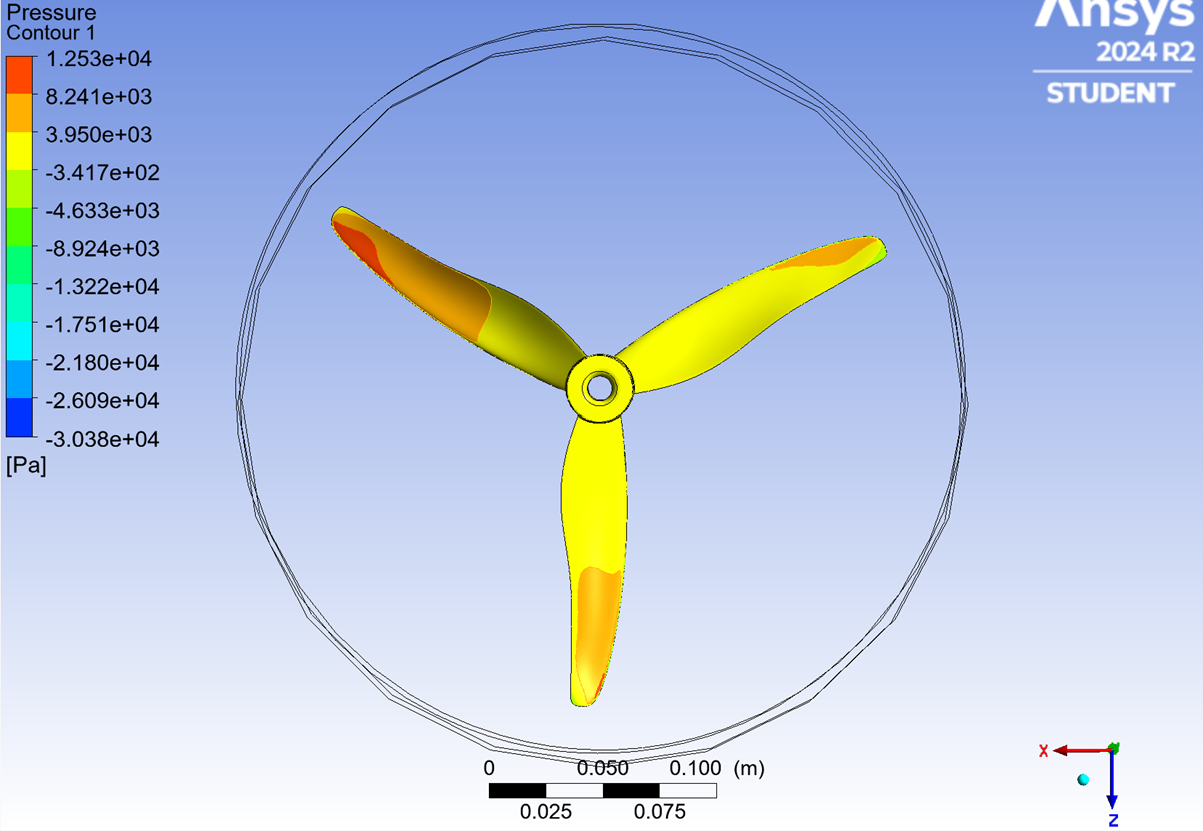
Below you can see picures of DROVER in action while testing, some CFD analysis of the propellers I personally completed, an example output from the IR camera, and the poster that was presented at showcase!

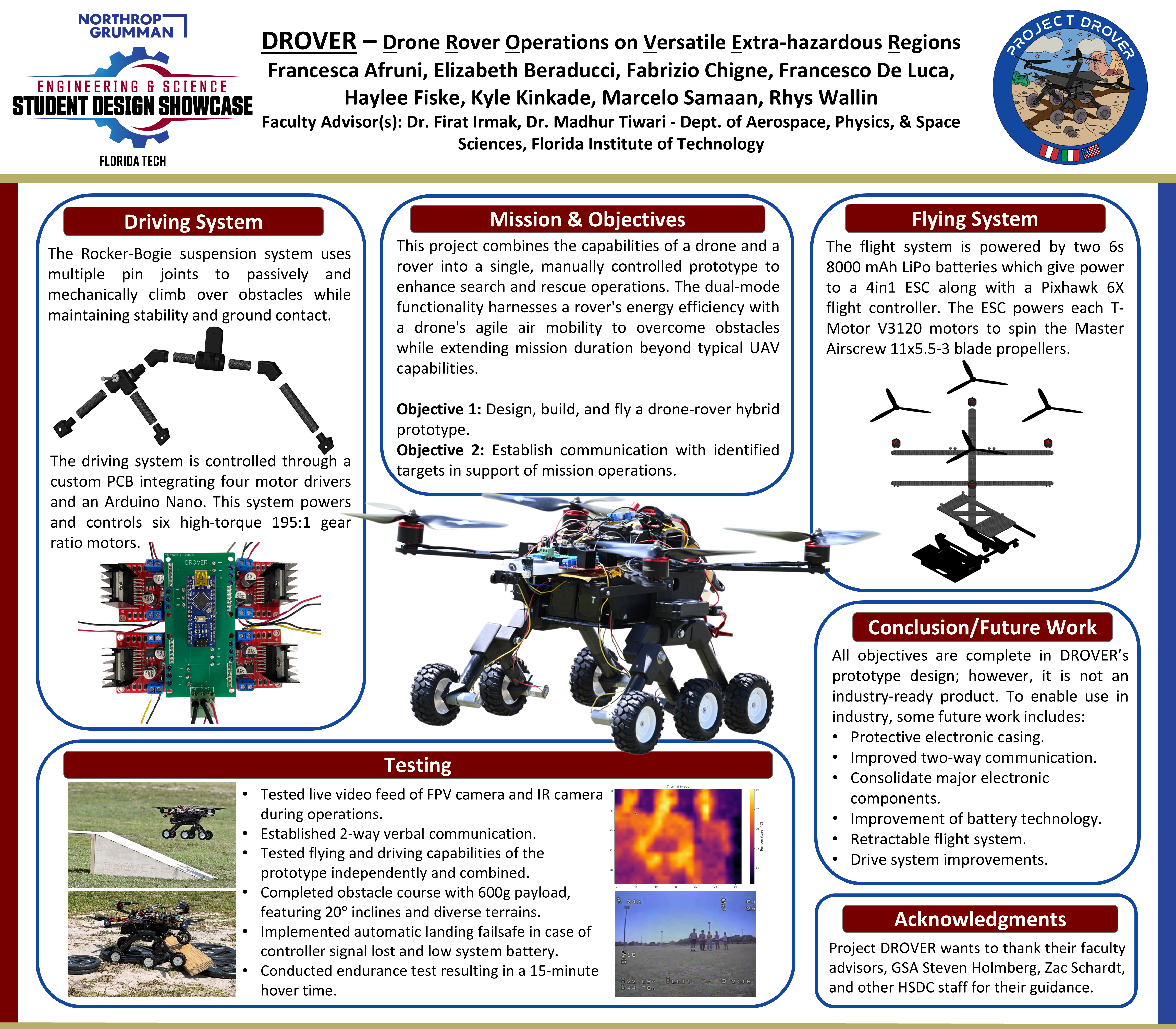
• Deliverables: SRR (completed), PDR (completed Dec. 2024), CDR (completed Feb. 2025), Poster and Presentation at the Northrop Grumman Engineering & Science Student Design Showcase (completed Apr. 2025)
Research Experience
Project ASTTRO (Astronomy Space Telescope Thermal Research and Optimization) (November 2023 - August 2024)
SPACE Lab - Dr. do Vale Pereira
The project’s main objective is to propose a design for a large observatory that will orbit around Earth in a highly eccentric orbit with an apoapsis close to the lunar orbit. My role was more focused on the thermal aspects of the telescope; Calculating the effects of the thermal environment on the telescope structure, with more emphasis on the mirrors to check for survivability and optical stability in given conditions. Engaging in research has proven to be an exceptional experience. The practical application of knowledge acquired from lectures and laboratories has made me aware of the importance of details and how vital interconnections between different subjects are in engineering projects, highlighting the importance of teamwork in developing a high-quality project.
Publication on SPIE Click Here
ASTTRO Team in front of the TVAC at the University of Arizona

RedHouse Project – Dr. Andrew Palmer Laboratory (September 2021 – May 2022)
I have volunteered in Dr. Andrew Palmer’s “Red House”, a greenhouse where I tended to tomato plants grown in conditions that emulated the ones humans would have to face while farming on Mars; the experiment was so successful that Heinz Tomato Ketchup created a limited run of prototype bottles “Marz Edition” from the crops.
Grad School Projects
🦾 Master’s Research Project: Closed-Loop Shape-Changing Soft Robot
This project focuses on the design and fabrication of a soft, shape-changing robotic platform capable of transitioning between multiple locomotion modes through controlled morphological reconfiguration. The robot is designed to operate in three primary modes: a flat, rectangular configuration that enables inching locomotion; a closed cylindrical configuration that allows rolling; and a hybrid cylindrical configuration that deploys telescoping leg actuators for legged locomotion. My role centers on the mechanical design of the telescoping leg actuators and the fabrication of silicone-based pneumatic elements that inflate and deflate to drive shape change and motion. The platform serves as a testbed for exploring closed-loop shape control in soft robotics, integrating mechanical design, soft-material fabrication, and actuation constraints to enable adaptable, multi-modal locomotion.
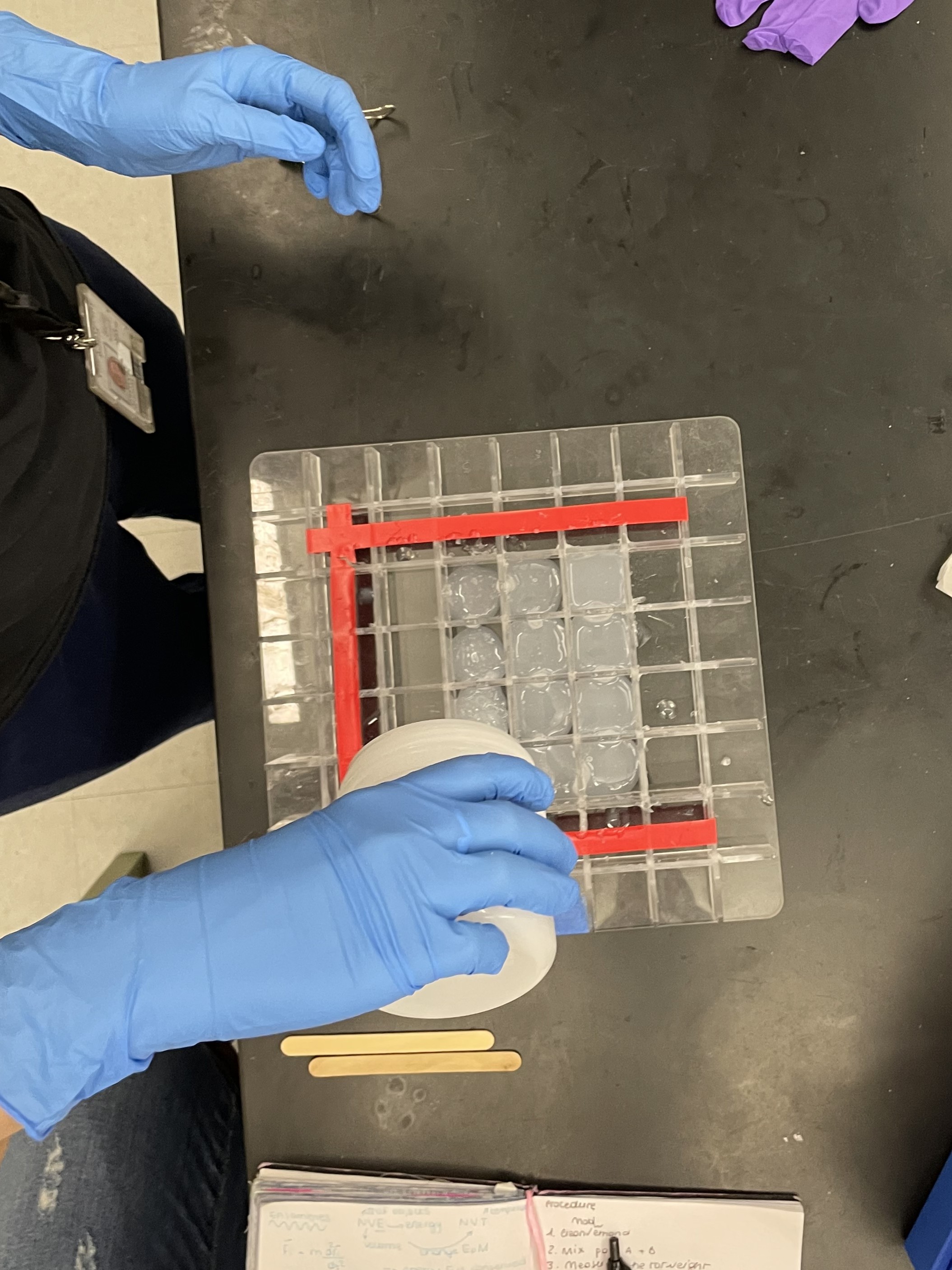
This is one of the first iterations of the molds, the picture shows both top and bottom molds as well as the silicon product!

The following movie shows an example of how the leg actuator will inflate and deflate. This is only the first iteration of the mold and I’m currently working on the second draft. (Video sped up x1.7)
CAD projects
Computer-Aided Engineering Class
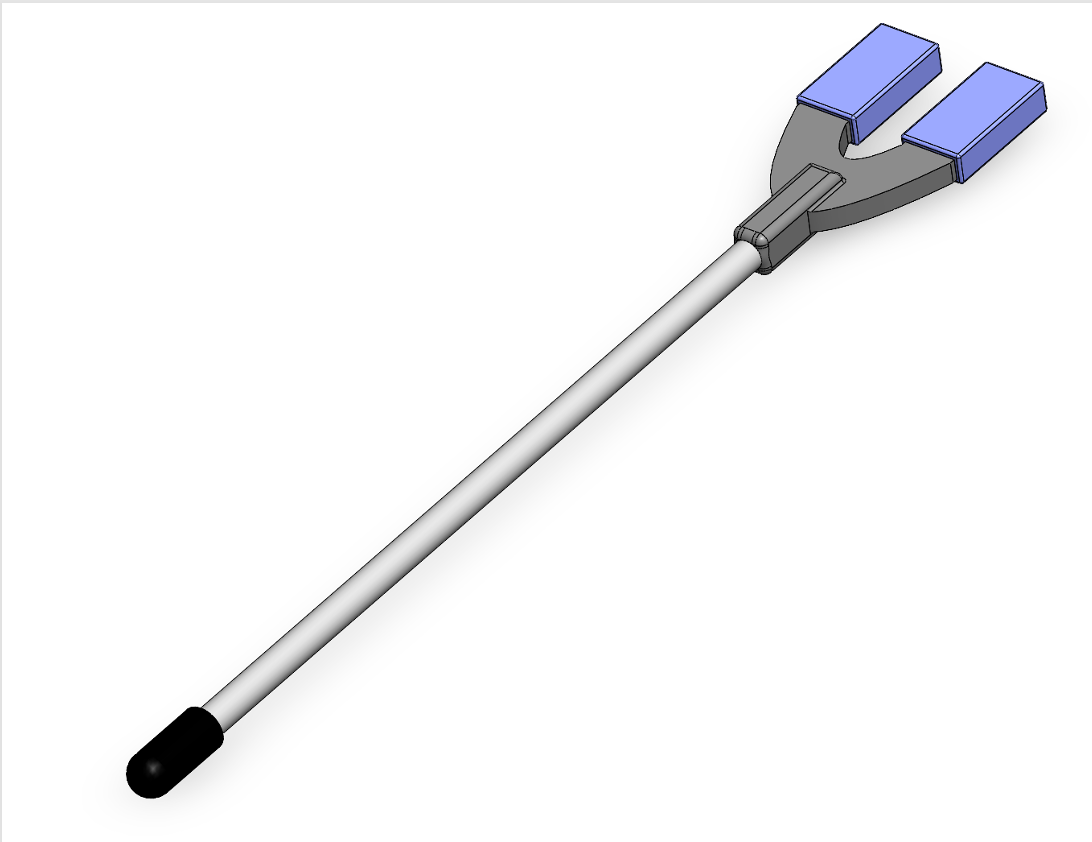
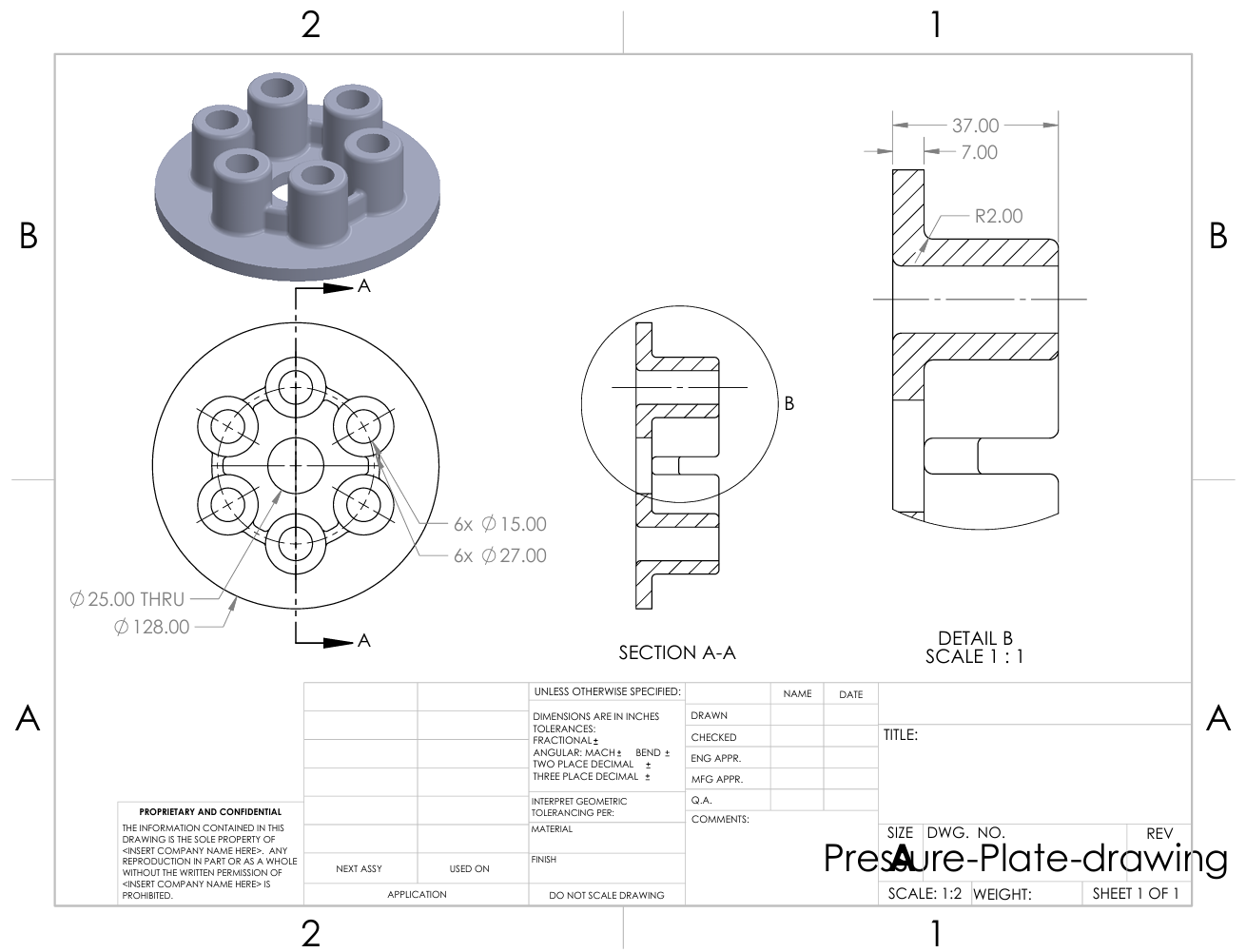
Some of the CAD works we have done so far in my Computer-Aided Engineering class. Featuring a mouthstick, a device for disabled people that allows them to operate laptops, mobile devices, and more. A walker, specifically for disabled kids. A drawing of a presure plate and a gif of an assembly of a scotch-yoke assembly I made. All done using Solidworks!

Computational: Applied Planning & Optimization
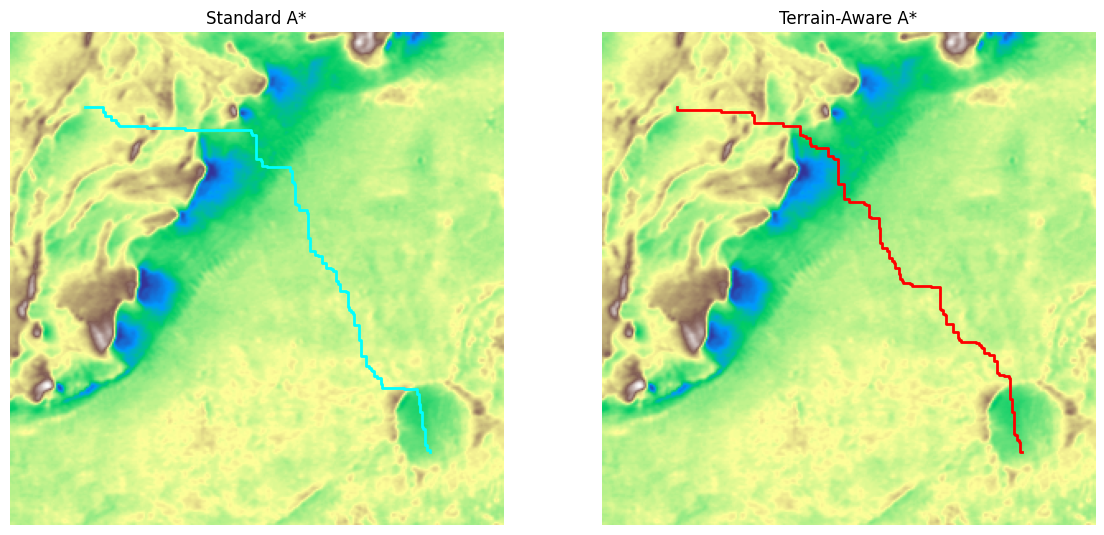
For my Applied Planning and Optmization class I developed (using Python) a path-planning algorithm that uses A* in order to find the safest path in terms of elevation for martian rovers. In this project I integrated real NASA elevation data by analyzing an orbiter picture of the Jezero crater. The steeper and higher, the more dangerous it is to traverse for the rover, and therefore, the higher the cost will be. I utilized the library “rasterio”, which manipulated the image to get the elevation, and then created the figures using the classic “matplotlib”. The code runs two different A* applications, a “standard” one, which only accounts for the distance, and a “terrain-aware” one, which implements the terrain-aware cost.
I have a dedicated page where you can see my full project write up, including Google Colab link for the algorithm, and output figures: [https://www.notion.so/Final-Project-2ad7c2fd6b72804494f5f74c98317863?source=copy_link]
This is just the Google Colab link if you are interested only in the algorithm: [https://colab.research.google.com/drive/1-Pl9fBFVdfNhcafQiDBtkcJlCS_wEYLe?usp=sharing]
Work Experience
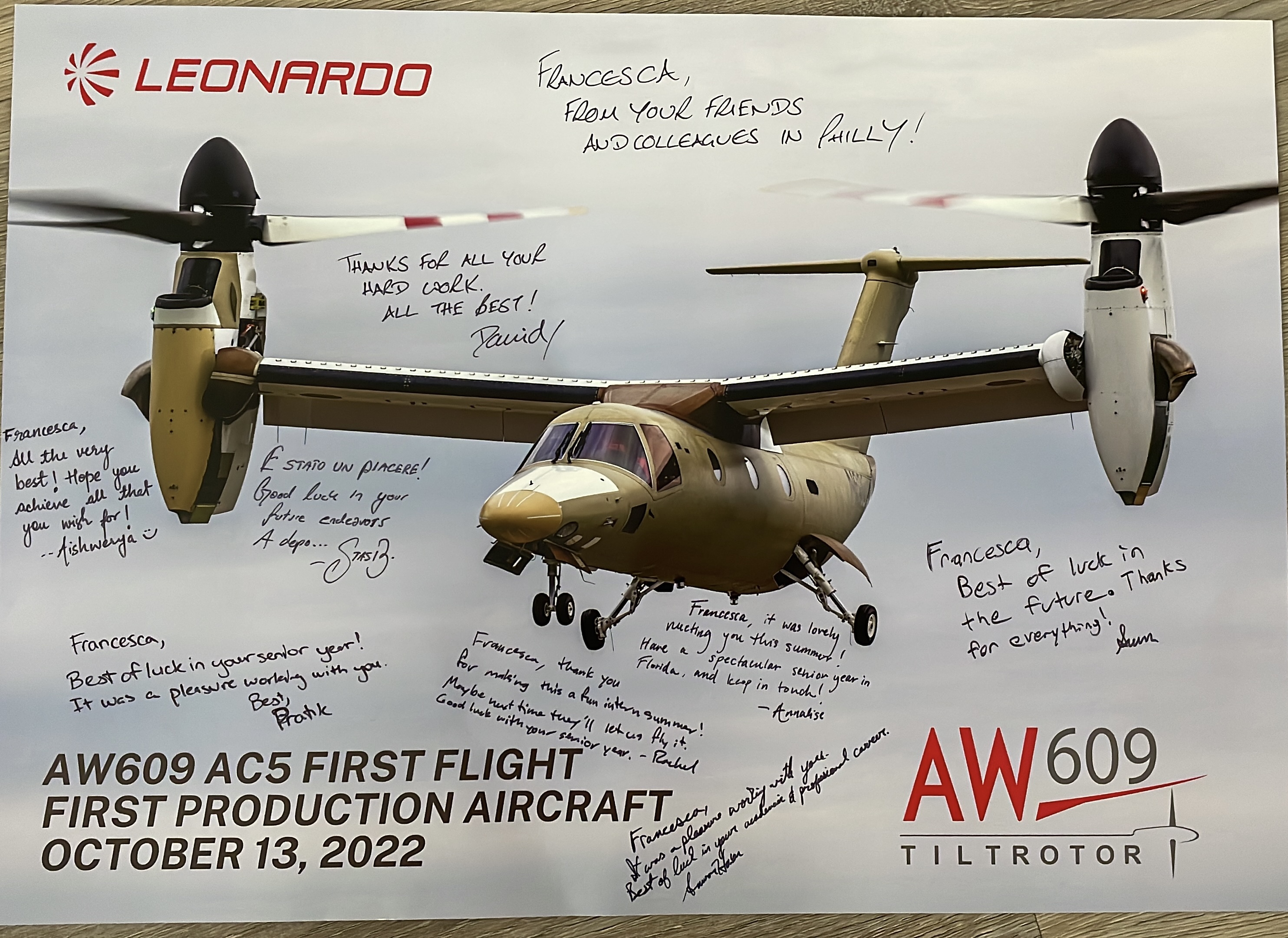
Leonardo Helicopters Intern – AWPC, Philadelphia, PA (May 2024 – Aug 2024)
• Worked as an Aircraft System Integration (ASI) Engineering Intern on the Flight Mechanics team of the AW609 (Tilt-Rotor) program
• Flight Data Analysis. Analyzed mast torque and engine power losses in AW609 flight tests, produced flight envelope plots under varying conditions, and conducted comparative blade studies using programs such as JPanda, PyPanda, iMission, Excel, MATLAB, and Python
• Conducted compliance checks and formatted test reports and plans, ensuring adherence to established rules and standards
• Produced performance data tables for the Tokyo Metropolitan Government, supporting potential AW609 operations at Ogasawara and contributing to future business opportunities with TMG.
• Gained knowledge in helicopter flight mechanics and tiltrotor technologies, actively assisting in telemetry and flight simulations for the AW609 aircraft
Workforce Developments & Summer Schools
NASA Mission Concept Academy (Jan 2024 – May 2024)
Served as Deputy Project Manager in a NASA workforce development program focused on mastering exploration mission protocols and industry practices led by NASA professionals. Collaborated with a team to apply professional practices and procedures, enhancing project management skills and understanding of NASA’s exploration processes. Deliverables: Team Organizational Chart, MCR, SRR, MDR, PDR, PDR Presentation
• Deliverables: Team Organizational Chart, MCR, SRR, MDR, PDR, PDR Presentation
ESA/EGRA Gravity-related Research Summer School – ESEC-Galaxia, Belgium (June 2023)
In June 2023, I was selected to be part of the ESA/ELGRA Gravity-Related Summer School, where I got to fly to Belgium and experience a blended format of lectures, workshops, and team activities on altered-gravity experiments. Learning from experts affiliated with ESA and ELGRA, who freely shared their expertise in biology, human physiology, physics, and engineering, has been truly enriching. However, the most rewarding experience has been encountering an incredibly diverse and talented group of young students from universities all over Europe, creating a stimulating and supportive environment. As part of completing the Summer School, we were divided into groups to complete a multidisciplinary team project. The teams were structured to feature completely different backgrounds: engineers, biologists, neuroscientists, and doctors, all from different countries. Diving into unfamiliar subjects made the project challenging; for example, our project consisted of testing human’s attentional load in altered gravity, which focused mostly on neuroscience, something quite different from engineering. It was incredibly gratifying to see how different branches of STEM subjects intertwine and are necessary to one another and how we managed to each use our skills and different backgrounds to achieve a successful experiment.
Saturn Team Presenting at ESA

NASA Proposal Writing and Evaluation Experience Academy (May 2023 – Aug 2023)
NASA Proposal Writing and Evaluation Experience Academy (NPWEE), a four-month workforce development held by NASA and Arizona State University designed to teach proposal writing and enhance effective teaming practices and soft skills. Contributed as an engineer to a team that researched and crafted a New Technology Proposal for NASA, showcasing innovative solutions and technical expertise. Played a key role as a secondary reviewer, assessing and scoring proposals from other teams, which honed critical evaluation skills and provided valuable insights into the proposal review process
• Deliverables: Taxonomy Topic Interest, Quad Chart, Org Chart, Shell Doc, Proposal, Review Panel
Undergrad Projects
Computational Projects
Space Vehicle Control Class - Final Project (Fall 2024)
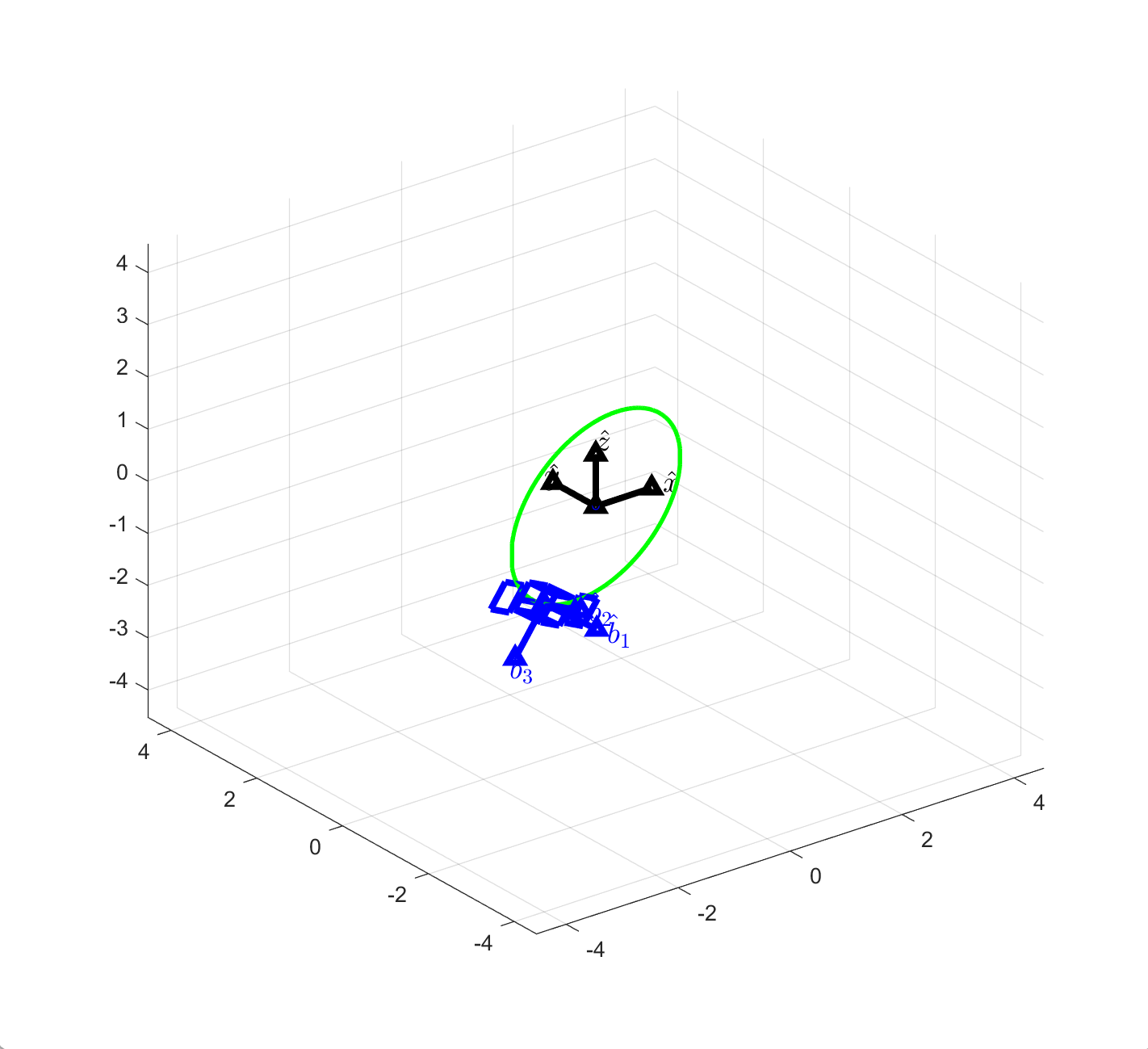
The objective of this project was to design the Attitude Determination and the Control System of a space vehicle simulating the Early Orbit Phase of a Medium Earth Orbit. The space vehicle had to detumble within its first ten orbits, and its angular velocity (𝜔) had to reduce to less than 0.2 RPMs. Once de-tumbled, the space vehicle had to rotate so that its −𝑏3 vector pointed to the center of the Earth for better communications. Finally, the space vehicle also had to align its 𝑏 2 vector with the velocity vector. The only components available for the project were up to three Magnetorquers (MTQ) with a maximum of 500 mA each, up to five Reaction Wheels (RW), and three sensors: a magnetometer, a sun sensor, and a gyro.
Read the whole project document here
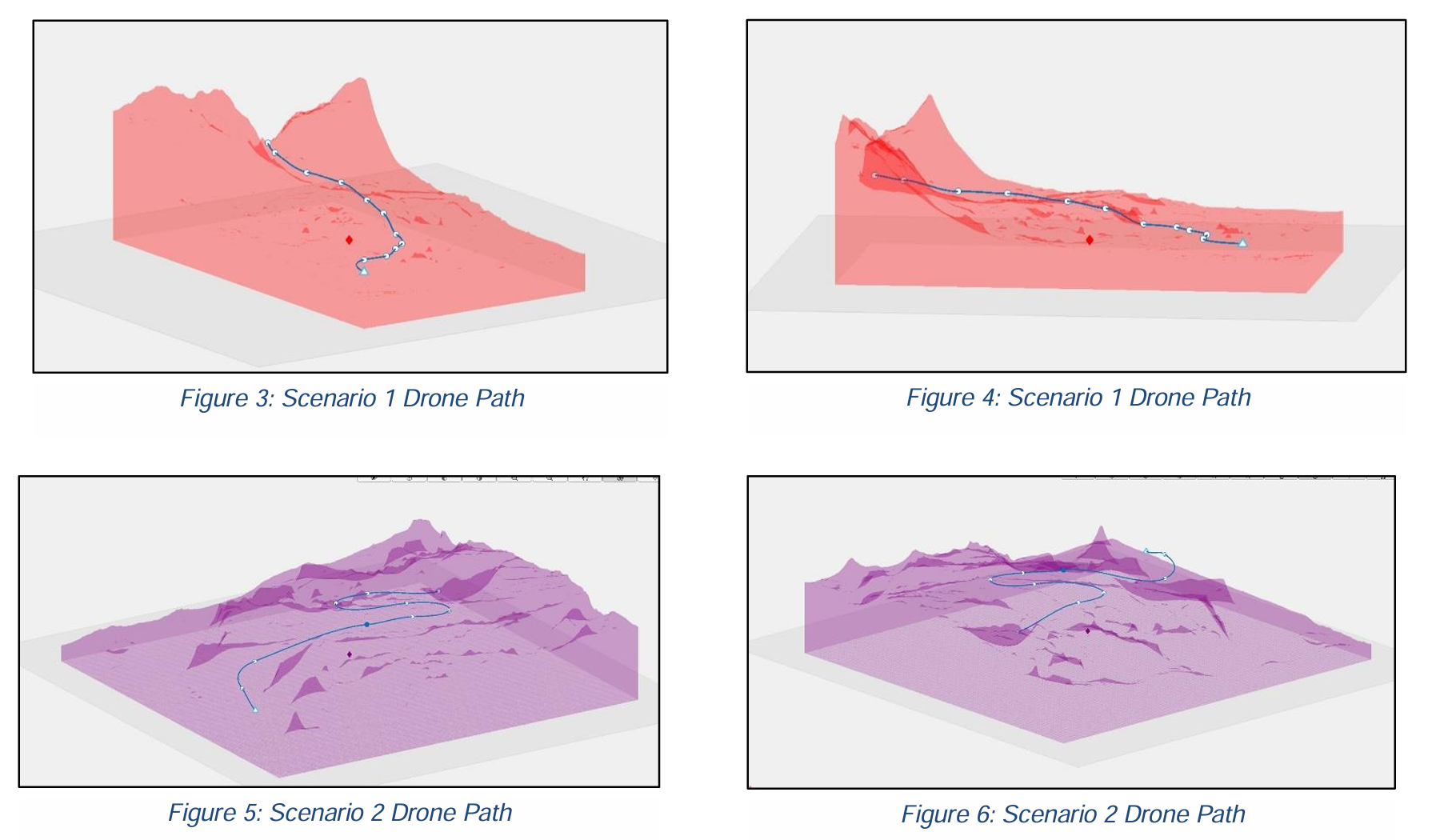
Aerospace Computational Techniques Class - Final Project (Spring 2024)
The objective of this project is to simulate the uneven Martian terrain to demonstrate the capability of a drone to navigate through an unexplored environment. The UAV Toolbox in MATLAB provides the necessary tools to design, simulate, and test unmanned aerial vehicles (UAVs) and advanced air mobility (AAM) applications. Key features of the toolbox include designing flight controllers, developing autonomy algorithms, and planning UAV missions. Note: the names of my teammates have been redacted for privacy reasons.
Read the whole project document here
CAD and ANSYS Projects
Computer Aided Engineering - Final Project (Spring 2025)
Objectives:
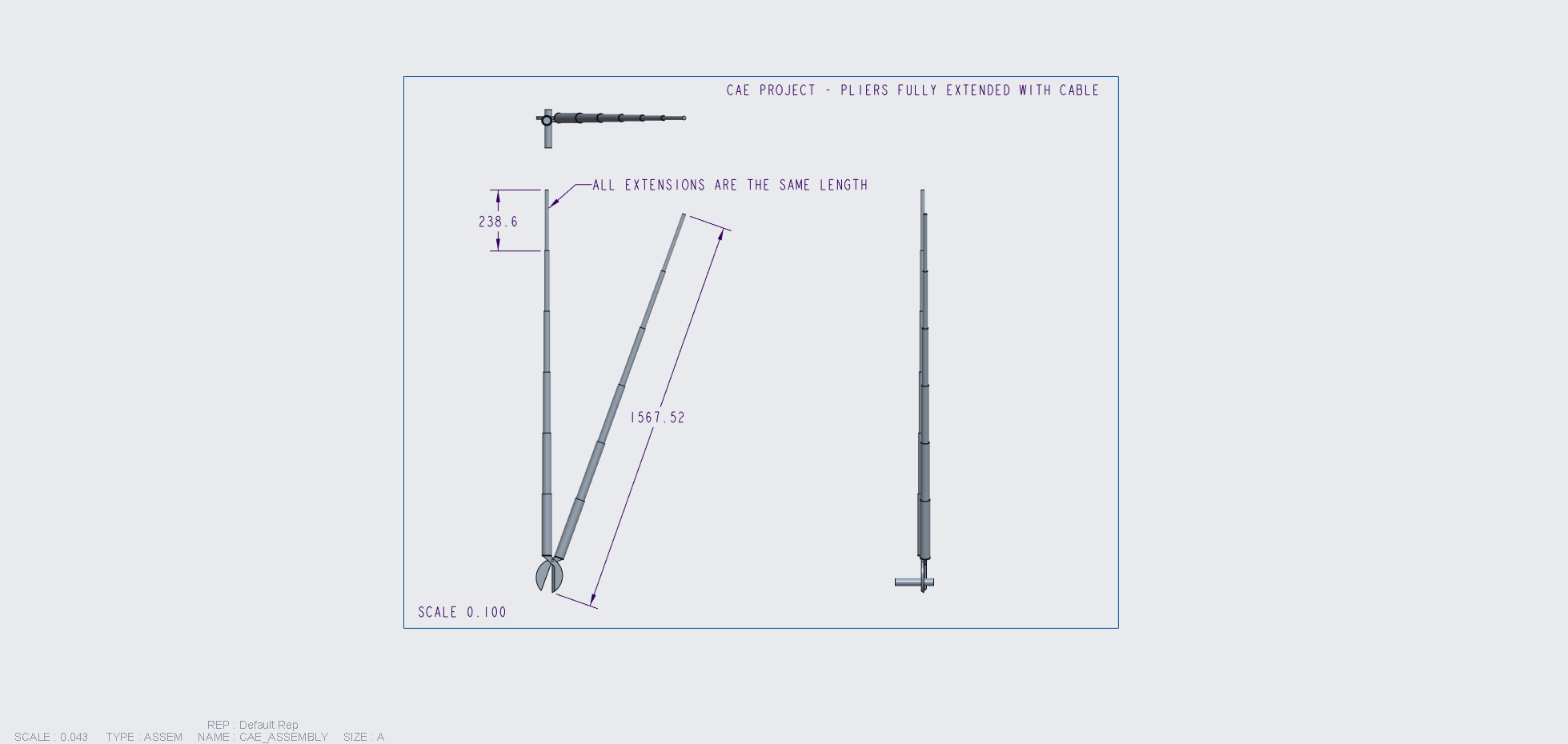
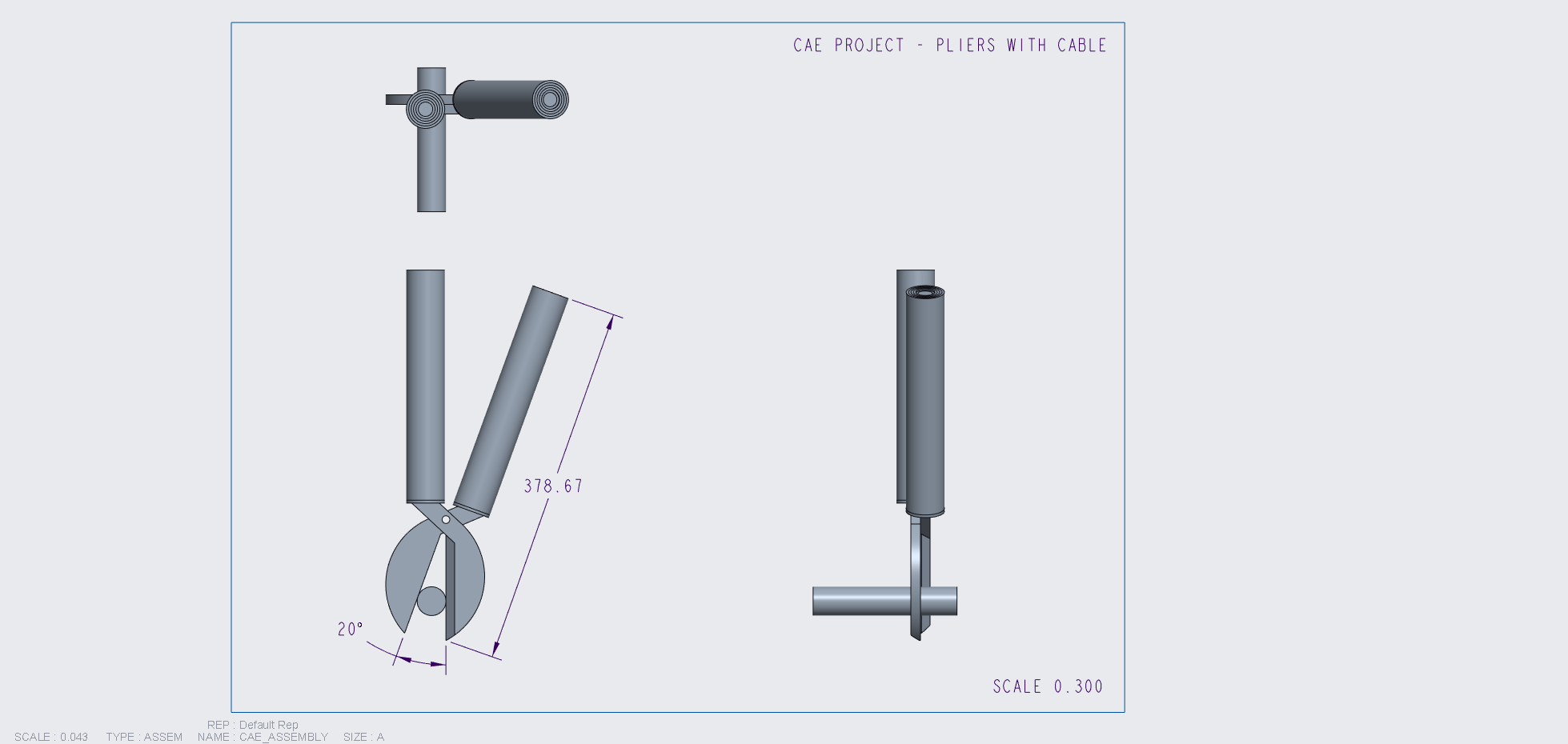
You are the owner of a small engineering firm bidding on a NASA SBIR project. The objective of the project is to design a hand-operated cutting tool that is able to cut a 30-mm diameter cable by applying a 500 N normal force at the cutting blade. The tool must be compact enough to fit in a box with dimensions 40 cm x 10 cm x 5 cm. You are free to use any design that meets these constraints. Your design will compete against other bidding firms’ designs, and the contract will be awarded based on evaluation criteria such as: (a) minimum weight, (b) compactness, and (c) minimum cost.
Design requirements:
The cutting tools must:
• Be capable of applying a 500 N normal force onto a 30-mm diameter cable using no more than 45 N applied force (your hands)
• Fit within a 40 cm x 10 cm x 5 cm storage box when fully assembled.
• Require no more than two hands to operate in a zero-gravity environment.
• Have no more than a 20° angle between the jaws when the 30-mm cable is placed between the jaws.
Read our Final Report HERE
Pliers fully extended:
Pliers retracted:
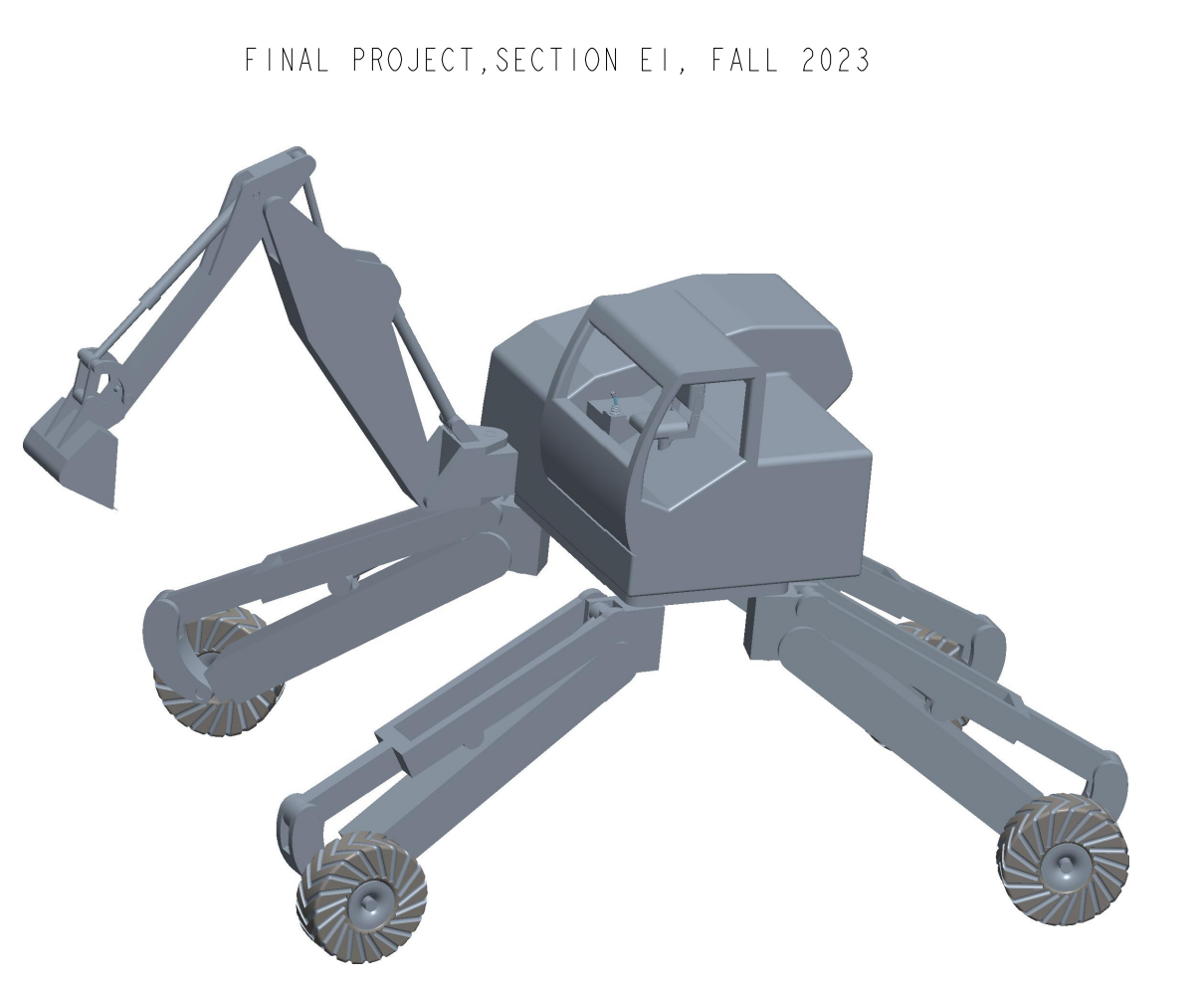
Menzi Muck CAD Modeling (Fall 2023)
Modeled a Menzi Muck for CAD class project with CREO PTC.
Freshman Design Project (Spring 2022)
The purpose of this project was to design and build a glider. The requirements included size (4 ft x 4 ft x 1 ft) and total mass (4.41lb) constraints. A payload bay had to be included for the accommodation of a small object of 43g (included in the total mass of the glider) and size 4 in x 3 in x 5 in. The glider could not include pre-shaped components from any kit, batteries, electronic motors, or any energy source. The materials allowed for the realization of the glider were balsa wood sheets, 3D printing wire, dowel rods, and Expanded Polystyrene Foam. The total budget of the project couldn’t exceed $50.

Other Projects
Mars Plant Challenge (Fall 2021 - Spring 2022)
Although my studies are more focused on airplanes and rockets, I am aware of the importance of all STEM subjects to space exploration. At Florida Tech, I have been very active in the Astrobiological Research and Education Society (ARES), where I have been part of a team of undergraduate students who managed to grow Oyster mushrooms in simulant Martian regolith, with the main objective to understand how to feed a crew in space, maximize resources, and forward all research to NASA’s lunar program Artemis. The team, the “Florida Tech Fungis”, won “Best Plant Growth”, “Most Innovative Experiment”, and “Best Evaluation Results” prizes in the professional division of the competition. Click here to read what Florida Tech wrote about us!
Oyster Mushroom grown by the team!


Space Ambassador (Spring 2021)
I wrote about space companies that are solving challenges on Earth. Here’s one of my articles about Leonardo (for which I would go intern two years later!)
Achievements & Funding
-
Tau Beta Pi Honors Society [2023 – Present]
Honored for academic excellence, for ranking among the top 1/8 of the junior class and top 1/5 of the senior class at F.I.T.
-
Dean’s List (Florida Tech) [2022 – 2025]
Recognized for maintaining high academic performance
-
Distinguished Student Scholar (Florida Tech) [April 2024]
The distinguished student scholars are undergraduate students who have completed more than 55 credit hours at Florida Tech with cumulative GPAs of 3.8/4.0 or higher
-
Outstanding Student of the Year – Department of Aerospace, Physics, and Space Sciences (Florida Tech) [April 2024]
The awards recognize well-rounded, active student-scholars, selected by their academic units, who have made contributions to their academic program, university, and community
-
Panther Fund Transfer Scholar Scholarship (Florida Tech) [August 2021 – May 2025]
Secured a prestigious $40,000 scholarship, granted over four years, in recognition of academic excellence and potential
-
Oxford Study Abroad Scholarship Award (Florida Tech) [June – August 2022]
Recipient of the $1,300 Scholarship for good academic standing (GPA > 3.75) and leadership
Professional Full-Time Eventing Rider for Team Italia
- Eventing Team Italia U21 (2018 - 2019)
- Team Italia Squad U21 CCIYR3 Eventing European Championships, Maarsbergen NL (2019)
- Eventing Athlete of National Interest (2020 - 2022)
- 5th place Italian Young Rider U21 Eventing Championships CCI3* (2019)
- Several Placements at International Level (2018 - 2021)
- Silver Medal at Italian Eventing Championships CNC1*(2016)
- Three Gold Medals and six Top10 places at Regional Level in all three Equestrian Olympic disciplines (2014-2020).
- Moved to the UK to compete and work as working-pupil for World Equestrian Games and Olympic riders Giovanni Ugolotti and Kathryn Robinson (Summer 2016)

